




































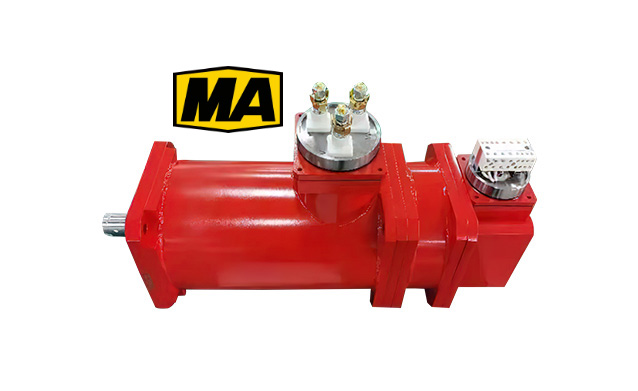





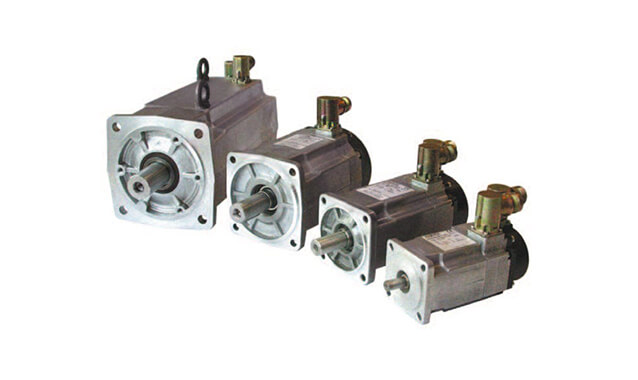












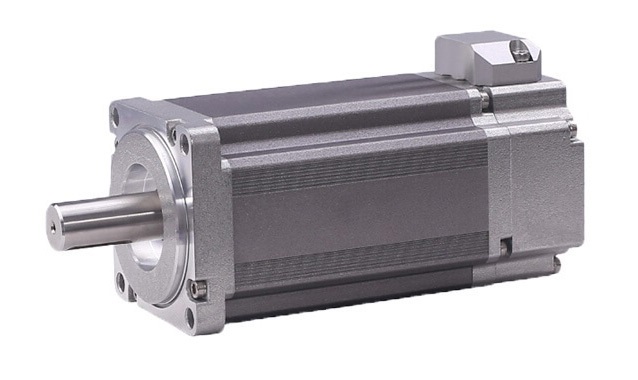






















































機器人在工業生產制造中的應用已經越來越普遍了。但是大家有沒有仔細觀察過這些機器人手臂的關節。

比如上圖所示的就是傳統的工業機器人,可以很明顯看到在它們的關節上“外掛”的伺服電機,而除了我們能夠看見的電機,在這些關節里面其實還有著非常復雜的(諧波)減速機和制動抱閘機構,這使得機器人的關節變得異常“肥大”。
當然,這對于許多大型機器人并不是什么太大的問題。

但是對于那些正被越來越多的應用于產線和設備周圍的小型機器人、尤其是需要配合人們完成各種復雜的輔助生產操作的協作機器人來說,關節的尺寸就變得十分關鍵了。

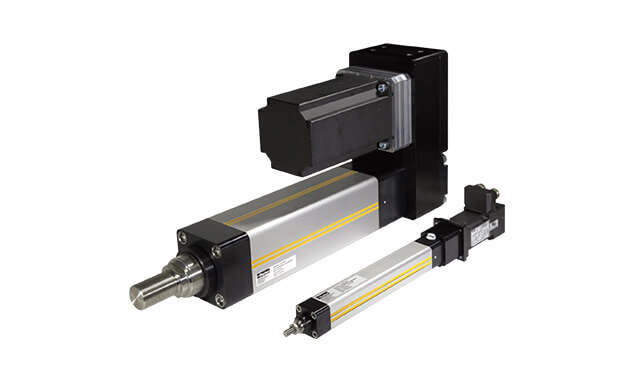
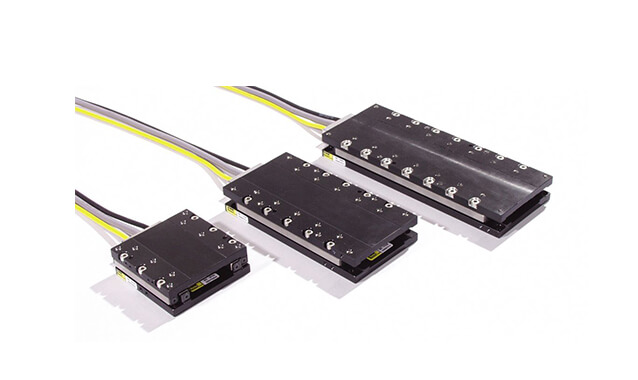
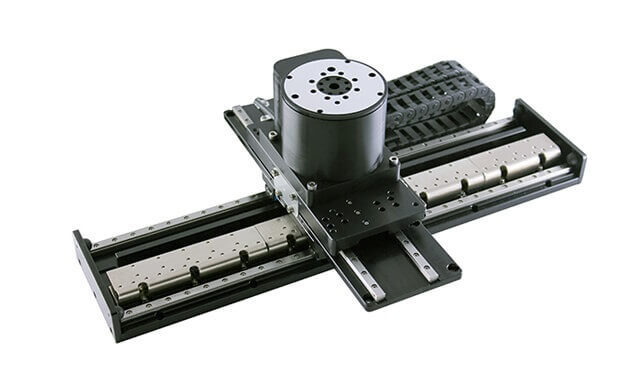
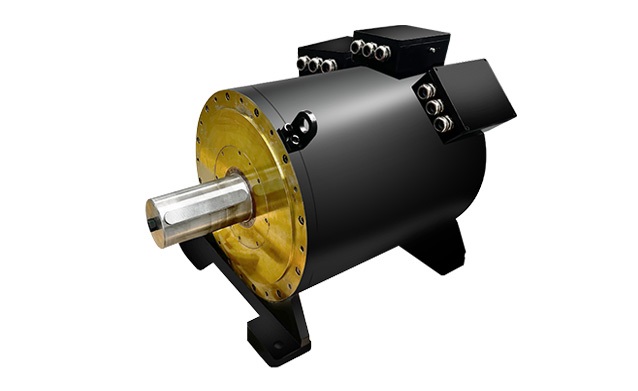
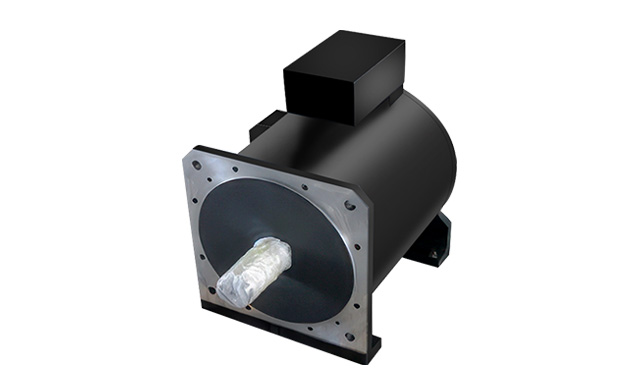
此時,在這種小型機械臂中,通常需要使用上圖這種無框直接驅動(力矩)電機,以減小機器人關節的尺寸、減輕機器人重量,并提升其動作效率。
而使用直接驅動電機,也會帶來一個新的問題,就是較高的技術實施難度和應用集成成本。
這一方面是因為無框電機本身復雜的操作使用流程,另一方面,在設計制造機器人過程中,需要將力矩電機、編碼器反饋、制動抱閘和諧波減速機...等多個零散的運控傳動組件集成到機器人關節這個尺寸極為有限的狹小空間中,同時還必須確保機械臂快速、靈活和可靠的運動性能。由此而帶來的超長開發周期和高昂制造成本,在一定程度上阻礙了小型關節機器人的廣泛應用和普及。
這就引出了我們接下來要和大家聊的一款產品:

這款名為 RGM 的機器人關節模組,是 Kollmorgen 在本月初剛剛發布的新產品,并在 CIROS 中國機器人展上做了首次展示。

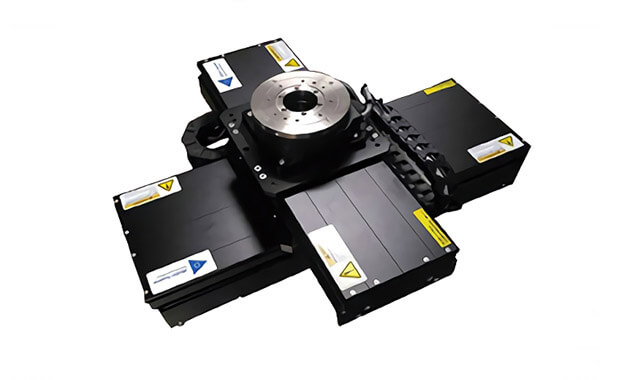
從現場展示的樣品看,RGM機器人關節模組體積僅一只拳頭大小。側面看,其外形框架呈 T 字型。下方為模組的法蘭底座,用于將其安裝在上一級機械臂的端部;左側為電機端蓋,右側為電機軸輸出,連接下一級機械臂。

頂部貼著的標簽上印著 “DEMONSTRATION UNIT”(演示用產品),且標注的產品序列號為 “017”,難不成這是從工廠下線的第 17 臺模組?

整個 RGM 機器人關節模組的外表面看上去非常簡單,外殼上沒有任何電氣連接端口,可以達到 IP54 的環境防護等級。

但從官方資料上的這張圖片看,RGM 機器人關節模組上尾部的藍色端蓋應該是可以從主體框架上拆下來的,目測其打開后可用于電氣線路的連接。

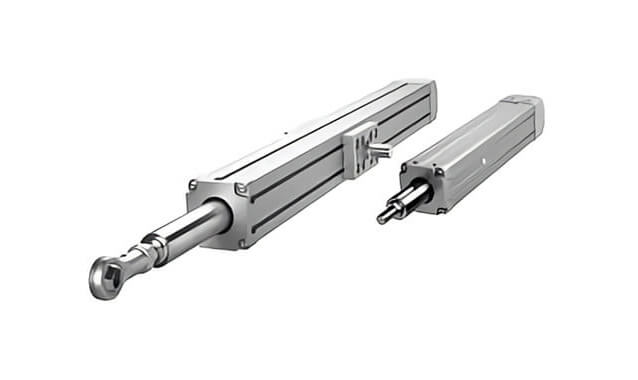
來到電機的輸出端,可以大致看到內圈的轉子輸出軸,和外圈用于安裝和連接負載的法蘭圓盤。
同時,我們在這里能看到從機器人關節模組內部引出的電氣接線,從線纜的顏色推測,紅藍為直流電源,灰色應為通訊信號線。這說明在 RGM 模組內部是有可用于穿過線纜的空心軸腔體的。

從側面近距離觀察 RGM機器人關節模組輸出端,可以看到法蘭盤圓柱體外表面上有 8 個螺紋孔,據介紹這是用于安裝和固定下一級機械臂的。
.jpg")
不難理解,連接在法蘭盤上的機械臂,會在模組轉子輸出驅動力的作用下,圍繞模組進行圓周運動。
這就是為什么 RGM 被稱為“機器人關節模組”的原因。
那么,這樣一款產品有什么特別之處呢?

首先,如上圖所示,此款 RGM將包括伺服驅動器、無框直驅電機、諧波減速機、反饋編碼器和制動器抱閘...等在內的多個機器人關節核心部件連接整合在一起,集成在一個模塊化組件中,并被設計封裝成適合機器人關節的 90° 轉角外形樣式,可以作為一個完整的關節總成直接用在工業機器人的機械臂上。

這就是說,用戶在設計和制造機器人時,可以不必考慮復雜的機械臂關節連接和動力集成,直接使用 RGM 關節模組連接和驅動機械臂,從而省去大量零散組件的設計、安裝、集成和測試等一系列復雜步驟和流程,尤其是,無需再為無框力矩電機的使用而消耗大量工時。

動力配置方面,由于每臺關節模組內部都集成了電機驅動器,采用 48V 直流動力電源和 CANopen 控制總線,所以,如果使用 RGM 關節模組,便無需再為機器人的各個關節軸配備單獨的伺服驅動器,只需要使用集成 CANopen 總線的機器人運動控制器即可。這將節省大量電氣柜安裝空間,讓設備系統變得更加緊湊。
再看電氣連接,因為多個關節模組的電源和通訊端口,是可以按照鏈式拓撲結構串行連接的,加之 RGM 使用了空心軸無框電機和諧波減速機,這樣,集成了 RGM 關節模組的機器人手臂,其電氣線纜是可以直接串聯敷設在機械臂空腔內部的,而不是像傳統機器人那樣并排掛在機械臂表面。這樣不僅讓機器人外觀變得十分簡潔,更重要的是,因為在關節處并沒有多根并聯電纜的扭轉彎折,從而降低了機器人工作時的運動負載;同時,更少的線纜數量還將會減輕機械臂的重量,這些都有助于提升機器人的工作效率。

RGM機器人關節模組采用了 19 位 Biss 反饋,可以達到 0.001° 的重復定位精度。同時,注意到在前面的產品拆解圖中顯示,RGM 內部在輸入端和輸出端分別各有一個編碼器,通過比較兩個編碼器的位置和速度反饋,參照驅動電流和電機扭矩的輸出,可以判斷出模組所在關節受到外界作用力的大小,將這一系列數據信息反饋給控制器,就能夠在不額外增加輔助傳感器的情況下,很方便的實現對機器人的安全控制。

另外,從官方發布的資料看,為了方便產品的應用和設備開發,Kollmorgen 還為用戶提供了相應的關節模組選型軟件,機器人制造商可以基于其用戶需求和應用場景,包括機械尺寸、工作位置、活動范圍、運動曲線...等等,自行配置和選擇合適的關節模組產品。

如此看來,通過將多個零散的機械臂關節組件整合封裝在一個集成模組中,RGM機器人關節模組實際相當于是一套用于機器人關節的一站式解決方案。個人認為,這種集成模組化關節部件,將很有可能徹底改變工業機器人的制造流程,因為相比傳統的機器人制造方法,使用 RGM 這種集成式關節模組,將極大簡化機器人關節的動力集成,并降低工業機器人的開發和應用門檻,讓機器人制造商更加專注于其機器人應用場景的開發,而不是糾結于復雜的動力機械組件。
按照官方的說法,RGM機器人關節模組將適用于有效負載 ≤10kg 的協作機器人 / 輕型機器人。


 浙公網備案33010802010418
浙公網備案33010802010418 